kmtronic_usb_relay
This project is a Python package for controlling KMTronics USB relay boards. It provides a simple interfaces to interact with the relays, allowing you to turn them on and off programmatically.
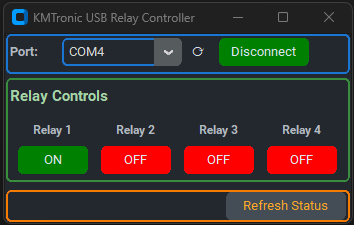
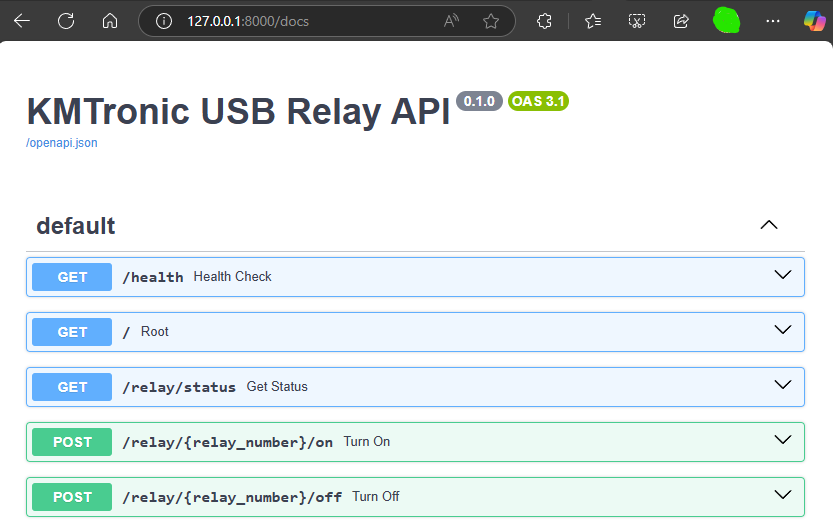
It also includes a GUI and FastApi implementation for easy control of the relays.
usage
kmtronic_usb_relay_gui
python -m src.kmtronic_usb_relay.four_channel_relay_gui
kmtronic_usb_relay_api
python -m src.kmtronic_usb_relay.four_channel_relay_api
source manual
RelayController(com_port, switch_delay=1.0, serial_utils=None, auto_connect=True)
Controller for KMTronic 4-Channel USB Relay devices.
Example
with RelayController("COM4") as relay: relay.turn_on(1) relay.turn_off(2) print(relay.statuses)
Initialize the RelayController.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
com_port
|
str
|
The COM port to which the relay board is connected (e.g., 'COM4'). |
required |
switch_delay
|
float
|
Delay in seconds after switching a relay (default: 1.0). |
1.0
|
serial_utils
|
Optional[SerialComUtils]
|
Custom SerialComUtils instance for testing/mocking. |
None
|
auto_connect
|
bool
|
Automatically open connection on init (default: True). |
True
|
is_connected
property
Check if the relay controller is connected to the COM port.
Returns:
| Name | Type | Description |
|---|---|---|
bool |
bool
|
True if connected, False otherwise. |
statuses
property
Get the status of all relays as a dictionary.
Returns:
| Type | Description |
|---|---|
Dict[str, str]
|
Dict[str, str]: Dictionary mapping relay names (e.g., 'R1') to their status ('ON' or 'OFF'). |
__enter__()
Enter the runtime context related to this object.
Returns:
| Name | Type | Description |
|---|---|---|
RelayController |
RelayController
|
The connected relay controller instance. |
__exit__(exc_type, exc_val, exc_tb)
Exit the runtime context and close the serial connection.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
exc_type
|
Optional[type]
|
Exception type. |
required |
exc_val
|
Optional[BaseException]
|
Exception value. |
required |
exc_tb
|
Optional[object]
|
Exception traceback. |
required |
close()
Close the serial connection to the relay board.
This method is safe to call multiple times.
connect()
Open the serial connection to the relay board.
Raises:
| Type | Description |
|---|---|
Exception
|
If the connection cannot be established. |
get_statuses()
Query and return the status of all relays.
Returns:
| Type | Description |
|---|---|
Dict[str, str]
|
Dict[str, str]: Dictionary mapping relay names (e.g., 'R1') to their status ('ON' or 'OFF'). |
Dict[str, str]
|
Returns an empty dict if communication fails. |
turn_off(relay_number)
Turn OFF the specified relay.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
relay_number
|
int
|
Relay number to turn OFF (1-4). |
required |
Raises:
| Type | Description |
|---|---|
ValueError
|
If relay_number is out of range. |
Exception
|
If sending the command fails. |
turn_on(relay_number)
Turn ON the specified relay.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
relay_number
|
int
|
Relay number to turn ON (1-4). |
required |
Raises:
| Type | Description |
|---|---|
ValueError
|
If relay_number is out of range. |
Exception
|
If sending the command fails. |
RelayControllerApi(com_port='COM4', controller=None)
User-friendly wrapper to run the FastAPI server for KMTronic USB Relay.
Example
api = RelayControllerApi("COM4") api.run()
Initialize the API server wrapper.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
com_port
|
str
|
Serial port for the relay board (e.g., "COM4" or "/dev/ttyUSB0"). |
'COM4'
|
controller
|
Optional[RelayController]
|
Optional RelayController instance for testing/mocking. |
None
|
run(host='127.0.0.1', port=8000, reload=False)
Start the FastAPI server using uvicorn.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
host
|
str
|
Hostname or IP address to bind the server. |
'127.0.0.1'
|
port
|
int
|
Port number to bind the server. |
8000
|
reload
|
bool
|
Enable auto-reload (for development). |
False
|
create_app(com_port, controller=None)
Create and configure a FastAPI app for the KMTronic 4-Channel USB Relay.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
com_port
|
str
|
Serial port for the relay board. |
required |
controller
|
Optional[RelayController]
|
Optional RelayController instance (for testing/mocking). |
None
|
Returns:
| Type | Description |
|---|---|
FastAPI
|
Configured FastAPI app. |
get_app()
Get a FastAPI app instance for ASGI servers (e.g., uvicorn). Uses the KMTRONIC_COM_PORT environment variable or defaults to 'COM4'.
main()
Command-line entry point to run the API server.
Usage
python -m src.kmtronic_usb_relay.four_channel_relay_api [COM_PORT] [--host HOST] [--port PORT] [--reload]
select_com_port()
Helper to select a COM port interactively if not provided. Returns the selected COM port or None if not available.
RelayControllerGui(com_port='', controller=None, relay_names=None)
User-friendly GUI for KMTronic USB 4-channel relay module. Provides an interface to connect, control, and monitor relays.
Initialize the RelayControllerGui.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
com_port
|
str
|
Default COM port to select. |
''
|
controller
|
Optional[RelayController]
|
Optional pre-initialized RelayController. |
None
|
relay_names
|
Optional[List[str]]
|
Optional list of relay names for labeling buttons. |
None
|
__del__()
Destructor to ensure resources are released when the object is deleted.
close()
Close the GUI and release resources. Closes the relay controller connection and destroys the main window.
refresh_ports()
Refresh the list of available serial ports and update the port selection combobox. Enables or disables the connect button based on port availability.
run()
Start the GUI main loop. Call this method to launch the application.
main()
Entry point for running the GUI as a standalone application.
SerialComUtils(baudrate=9600, bytesize=serial.EIGHTBITS, stopbits=serial.STOPBITS_ONE, parity=serial.PARITY_NONE, timeout=2.5)
User-friendly utility class for serial COM port communication.
This class provides methods for discovering available serial ports, connecting/disconnecting to a port, and sending/receiving data. It also supports context management for safe resource handling.
Initialize SerialComUtils with serial parameters.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
baudrate
|
int
|
Serial baudrate (default: 9600). |
9600
|
bytesize
|
int
|
Number of data bits (default: serial.EIGHTBITS). |
EIGHTBITS
|
stopbits
|
int
|
Number of stop bits (default: serial.STOPBITS_ONE). |
STOPBITS_ONE
|
parity
|
str
|
Parity setting (default: serial.PARITY_NONE). |
PARITY_NONE
|
timeout
|
float
|
Read timeout in seconds, or None for blocking mode (default: 2.5). |
2.5
|
is_connected
property
Check if the serial connection is open.
Returns:
| Name | Type | Description |
|---|---|---|
bool |
bool
|
True if connected, False otherwise. |
__enter__()
Enter the runtime context related to this object.
Returns:
| Name | Type | Description |
|---|---|---|
SerialComUtils |
SerialComUtils
|
The instance itself. |
__exit__(exc_type, exc_val, exc_tb)
Exit the runtime context and close the serial connection.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
exc_type
|
Optional[type]
|
Exception type. |
required |
exc_val
|
Optional[BaseException]
|
Exception value. |
required |
exc_tb
|
Optional[object]
|
Exception traceback. |
required |
__repr__()
Return a string representation of the SerialComUtils instance.
Returns:
| Name | Type | Description |
|---|---|---|
str |
str
|
Human-readable summary of the current configuration and port. |
close_connection()
Close the connection to the COM port.
Returns:
| Name | Type | Description |
|---|---|---|
bool |
bool
|
True if disconnected or already closed, False if error occurred. |
connect(port)
Open a connection to a COM port with the configured parameters.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
port
|
str
|
Device name of the port (e.g., 'COM3'). |
required |
Returns:
| Name | Type | Description |
|---|---|---|
bool |
bool
|
True if connection was successful, False otherwise. |
disconnect()
Alias for close_connection. Closes the serial connection.
Returns:
| Name | Type | Description |
|---|---|---|
bool |
bool
|
True if disconnected or already closed, False if error occurred. |
format_port_detail(port_info)
staticmethod
Format a port info dictionary as a readable string.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
port_info
|
dict
|
Dictionary with keys 'device', 'description', 'hwid'. |
required |
Returns:
| Name | Type | Description |
|---|---|---|
str |
str
|
Formatted string describing the port. |
get_busy_ports()
staticmethod
Attempt to list COM ports that are currently in use (best effort).
Returns:
| Type | Description |
|---|---|
List[str]
|
List[str]: List of port device names that are in use. |
get_connection_params()
Get the current serial connection parameters.
Returns:
| Name | Type | Description |
|---|---|---|
dict |
Dict[str, Any]
|
Dictionary containing baudrate, bytesize, stopbits, parity, and timeout. |
get_port_details()
staticmethod
Get details of all available COM ports.
Returns:
| Type | Description |
|---|---|
List[Dict[str, Any]]
|
List[dict]: Each dict contains: - device (str): COM port number (e.g., 'COM1') - description (str): Port description - hwid (str): Hardware ID |
get_port_names()
staticmethod
List all available COM port device names.
Returns:
| Type | Description |
|---|---|
List[str]
|
List[str]: List of device names (e.g., ['COM1', 'COM2']). |
log_port_details(port_name=None)
staticmethod
Log details of all COM ports or a specific port if port_name is given.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
port_name
|
str
|
Device name of the port (e.g., 'COM3'). |
None
|
open_connection(port)
Alias for connect. Opens a connection to the specified port.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
port
|
str
|
Device name of the port. |
required |
Returns:
| Name | Type | Description |
|---|---|---|
bool |
bool
|
True if connection was successful, False otherwise. |
receive(size=1, as_int_list=False)
Receive data from the serial port.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
size
|
int
|
Number of bytes to read (default: 1). |
1
|
as_int_list
|
bool
|
If True, return a list of ints instead of bytes. |
False
|
Returns:
| Type | Description |
|---|---|
Optional[Union[bytes, List[int]]]
|
bytes or List[int] or None: Received data, or None if not connected. |
send(data)
Send data to the serial port.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
data
|
bytes
|
Bytes to send. |
required |
Returns:
| Name | Type | Description |
|---|---|---|
bool |
bool
|
True if sent, False if not connected. |